
This project is all about embedded BLDC motor control on an STM32 platform. Two different approaches were explored.
The first one: driving motors over a CAN bus. That means dealing with CAN communication, command framing, coordinating several motor controllers on a shared network, and handling basic fault conditions without things falling apart.
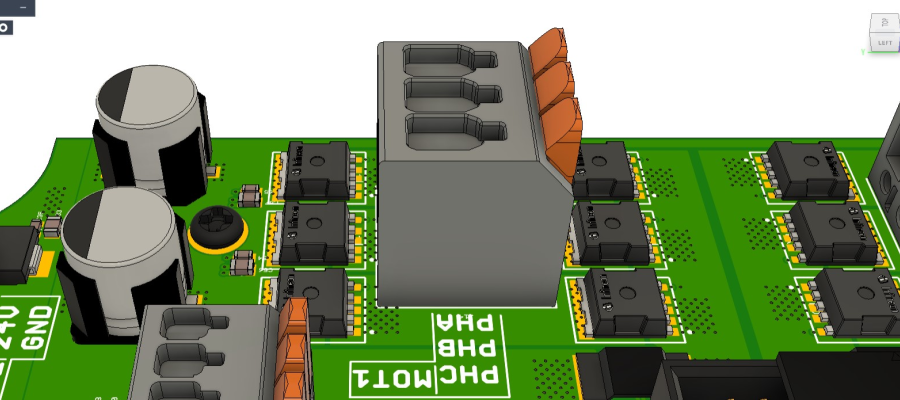
The second approach is more involved: direct three-phase control, with a custom motor driver built to handle 200 W at 24 V and 7 A. That includes designing the MOSFET power stage, PWM generation, commutation logic, current and voltage sensing, plus overcurrent and thermal protection.
Distance sensors and IMUs were also integrated to keep the system stable on sloped or uneven surfaces. The main thread running through all of it: getting power electronics, motor control, and sensor feedback to work together as one coherent system — not just as separate blocks bolted together.