This article describes work around embedded motor control and autonomous system design, with a focus on BLDC motors, power electronics, and sensor integration.
The system architecture is based on STM32 microcontrollers, used for real-time control, peripheral management, and system supervision.
Two motor control approaches are addressed.
The first relies on BLDC motors controlled over a CAN bus, covering CAN communication, command framing, coordination of multiple motor controllers, and basic fault handling on a shared network.
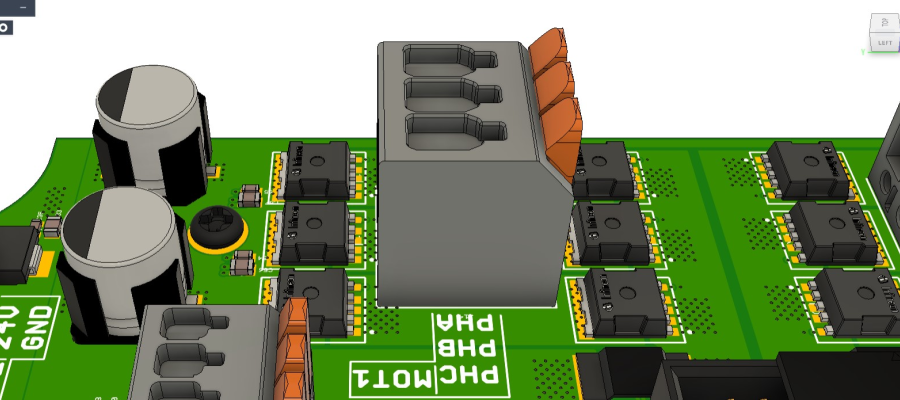
The second approach involves direct three-phase BLDC motor control, including the design of a custom motor driver rated at 200 W, 24 V, 7 A. This work includes:
- Three-phase power stage design using MOSFETs and gate drivers
- PWM generation and commutation logic
- Current and voltage sensing
- Overcurrent and thermal protection mechanisms
Sensor inputs such as distance sensors and IMUs are integrated to support safe operation and adaptive behavior, particularly on inclined or unstable surfaces.
Overall, the work focuses on building reliable embedded control systems by combining motor control, power electronics, and sensor feedback in a coherent architecture.