A robot mainboard is where power, motion, intelligence, and system reliability all meet. You can’t treat each block in isolation — they’re all connected, and the design has to reflect that.
LiFePO4 was chosen for its thermal stability, long cycle life, and safety profile. Battery management has to hold up during motor startup and current peaks without destabilizing the rest of the system.
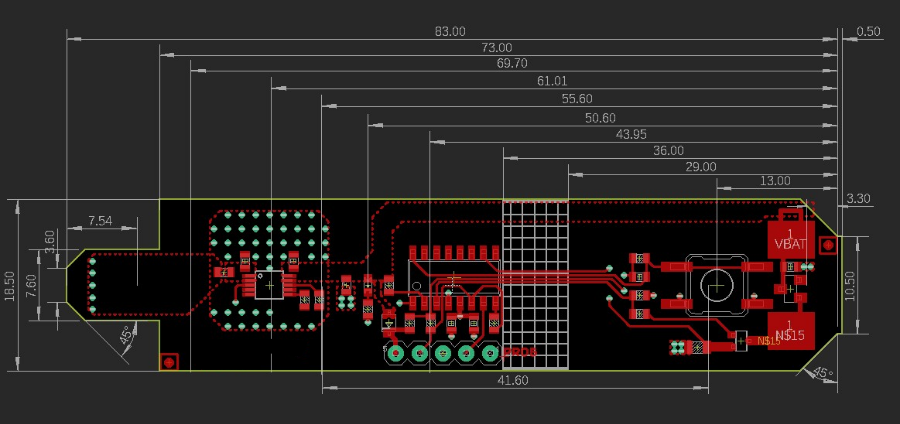
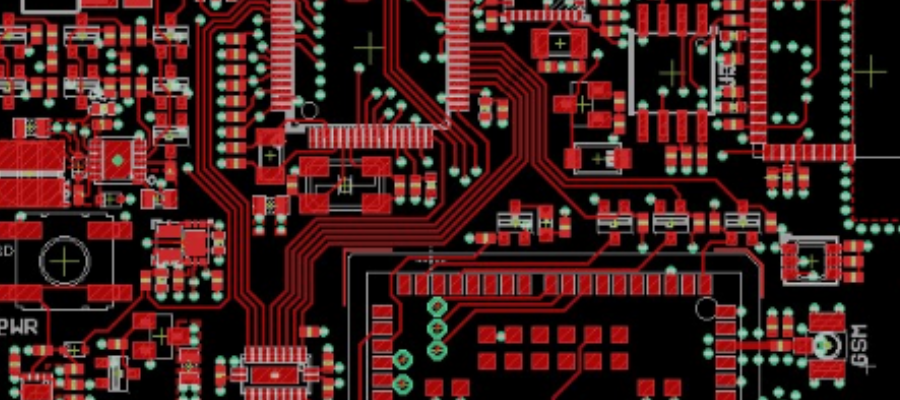
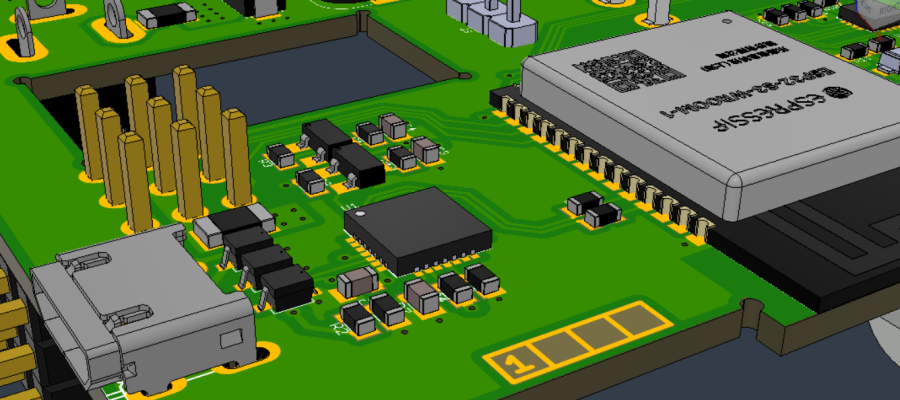
The ESP32-S3-WROOM-1-N16R8 handles control, Wi-Fi, and system supervision. H-bridge drivers run the DC motors in both directions. Beyond the schematic, what makes the board solid is the partitioning between power electronics, control logic, and sensitive digital domains: motor current paths, decoupling, grounding strategy, thermal dissipation. On a board like this, everything is connected to everything else.